Techblog #08
Je to tady. Uběhla nějaká doba a projekt AROS byl uzavřen v rámci předmětu Robotika (BROB) na VUT FEKT. To ovšem ani v nejmenším neznamená, že by skončil. Jen je čas na krátké shrnutí.
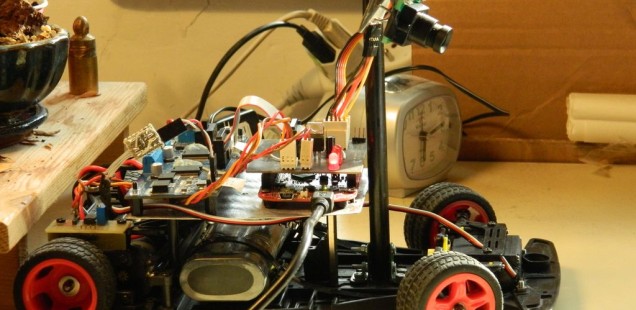
1. Dvoukamerová koncepce není tak dobrý nápad jako se prve zdálo. Dalo by se na tom jet, ale do budoucna beztak bude dráha ještě širší a opravdu se začne jezdit u jedné strany. Takže mám takové tušení, že dvouoká varianta se neprosadí a bude tam nakonec jedno oko, které bude hledět kus před auto a hádat, co to je za kus dráhy, co nás bude čekat. Uvidíme.
2. Algoritmus plovoucího průměru byla dobrá znouzectnost, ale má velkou chybovost a náchylnost na „duchy“. Bude nahrazen Sobelovým operátorem a možná i něčím dalším.
3. Je potřeba využít akcelerometr. Ideálně dva. Vzhledem k faktu, jak autíčko rádo uklouzává, není vůbec marné o tom minimálně vědět. Reálně by nebylo špatné se tím i řídit. Rozpoznat kus dráhy, vědět za jak dlouho přijde, řídit se podle akcelerometru, hm..?
4. Přisvícení je hezká věc, ale jde to i bez něj.
5. Datalog z autíčka na sběr telemetrie. Nevím no, mám tu dva hlasy, jeden razí BlueTooth, druhý WiFi. Ať to bude cokoli, je to nezbytnost.
6. Sledování otáček kol. Tohle se bude muset doladit.
7. Odlehčená konstrukce se osvědčila. Možná půjde ještě víc odlehčit.
Víc mě toho nenapadá, že by se dalo k tomu říct. Je to takový seznam věcí, na které bude potřeba se soustředit a věnovat jim prostor. Autíčko mám doma, tak asi začnu vymýšlením sběru telemetrie. To bude dobrý začátek.
Dokumentace z předmětu BROB: Dokumentace AROS2
Prezentace AROSe: Prezentace
Očekávejte mě na úscitu pátého dne. Anebo radši ne.
